Language to Rewards for Robotic Skill Synthesis (2023.6.14 Google DeepMind)
Website
https://language-to-reward.github.io/
Problem
reward shaping in robotics
Solution
utilize LLMs to define reward parameters, and bridge the gap between high-level language instructions or corrections to low-level robot actions
Reward translator + Motion controller
Reward translator:
![]()
User instructions + Motion template and rules → Motion description
Motion description + Reward Coder Prompt → Reward function
The transformation is done by LLM
Keypoints:
-
Step by step thinking:
Not directly generate codes but firstly generate description and then generate codes
-
Template:
Directly generating codes is difficult for LLM. But it is much more easier to complete a template
Contributions
Firstly apply the LLM to reward shaping in for robotic skill synthesis
Weaknesses
- Still much work(template design) need to be done by human.
- Constraining the reward design space helps improve stability of the system while sacrifices some flexibility.
Experiments
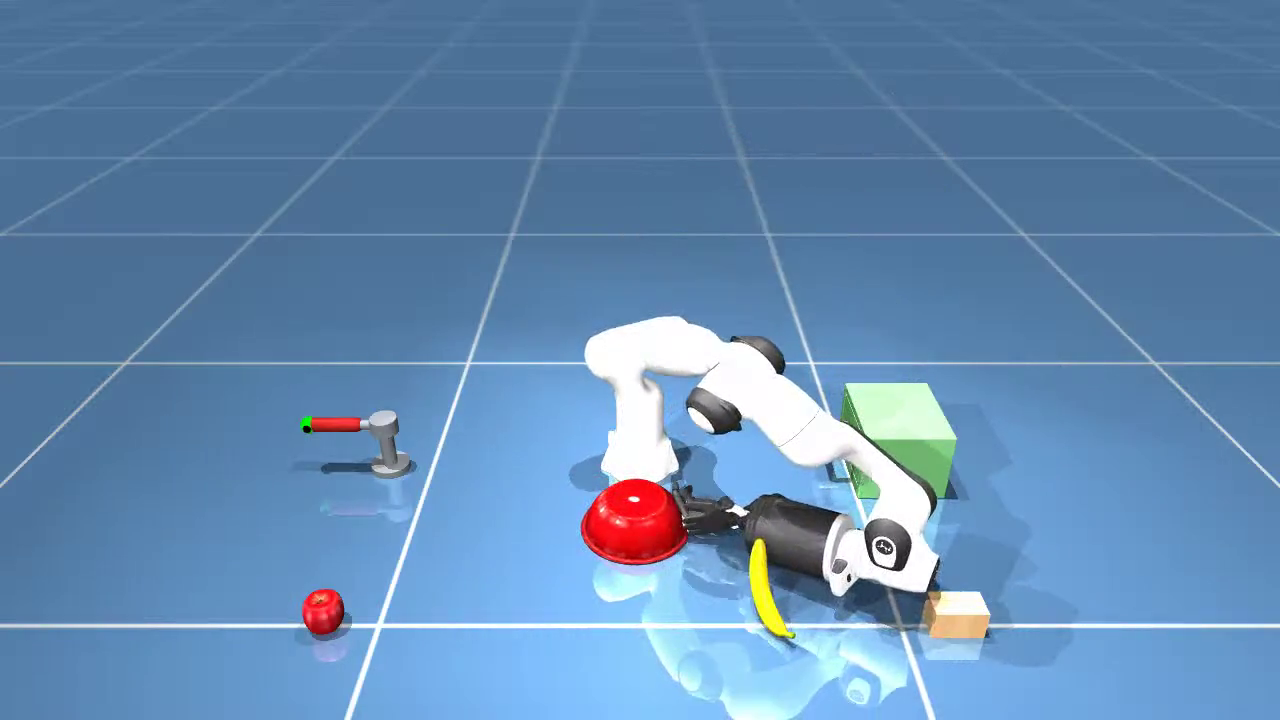
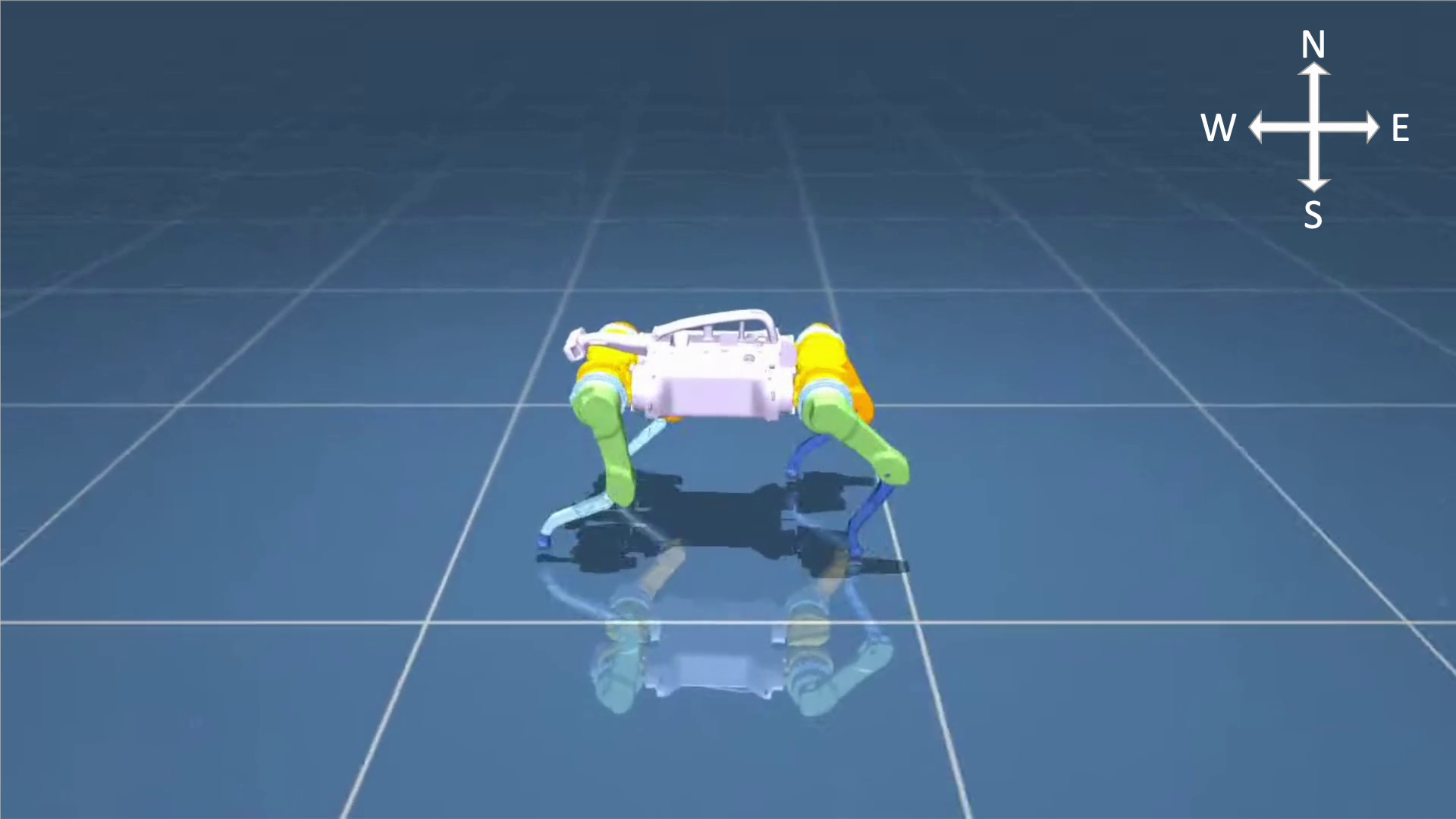
Environment: MuJoCo MPC
Underlying LLM: GPT-4
2 robots: quadrupted robot(locomotion) and dexterous manipulator(manipulation)
Comparison and ablation experiment:
Reflection
- learn to tell a good story.
- If you have a novel idea, but it does not work well. Maybe you can try to take a step back (i.e. template in this paper) to let it work temporarily. Figure out how to let it work later.